
The reason the drone archetype exists is because it’s a tried and tested format. Four propellers on either corner (or six if you’re lucky) and a relatively aerodynamic design with legs for taking off and landing. Throw in a few cameras and sensors and you’ve got yourself a drone that’s easy to recognize. However, break this archetype and you’ve got yourself something quite unrecognizable – like the Jupiter drone concept by Anton Weaver.
Weaver’s drone has a monolithic orb-esque form that defies both gravity as well as the ‘rules’ of drone design. It uses a large single propeller, and what I imagine is an internal gyroscope to move around in the air, stay upright, and even twist and turn while in mid-air. The drone’s unusual design is further characterized by the presence of fisheye lens cameras that allow it to capture everything it sees, sort of like a levitating GoPro.

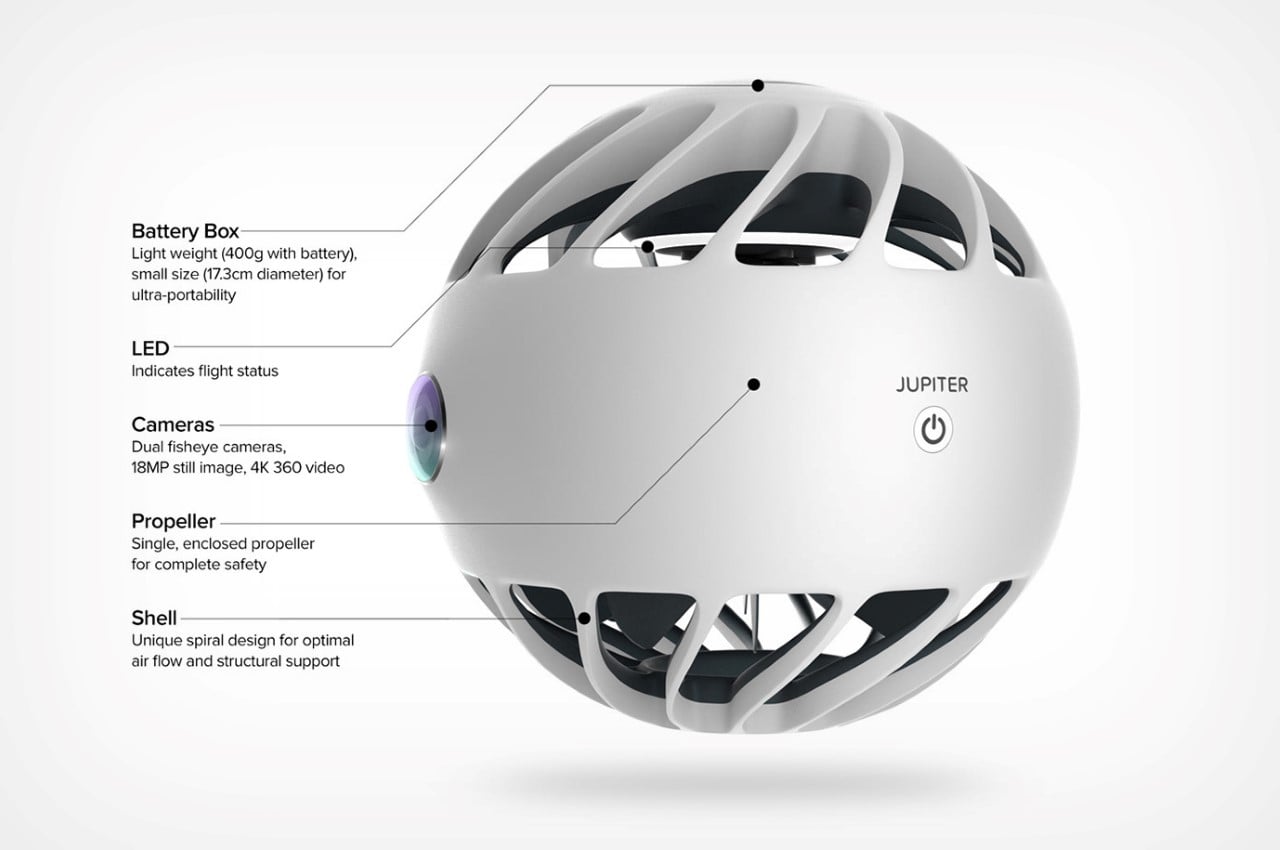
Weaver’s design focuses more on shock-value than actual physics or aerodynamics, which is precisely what makes the Jupiter drone concept fun to analyze from a design sense. The drone’s strange shape almost gives it the appearance of an all-seeing eyeball that levitates around everywhere, and according to Weaver’s visualizations, it’s the kind of drone you’d use to film the action around you – thanks to the presence of dual fisheye 4K cameras that can capture in 360°.
It comes with the battery mounted on the top (weighing a commendable 400g) and has sensors at the bottom that detect proximity, allowing it to nail the landing – because without any bumpers or feet, the Jupiter can only take-off and land on your palm. The fact that the outer shell protects the internal propeller so well makes it perfect for this, as well as acting as a general buffer as the drone flies around filming the world around you!
Designer: Anton Weaver




 NASA has announced four projects as part of its Discovery Program, which sees the space agency asking scientists to pitch focused, relatively low-cost missions for it to take on and develop into full-fledged missions. "Although they're not official m...
NASA has announced four projects as part of its Discovery Program, which sees the space agency asking scientists to pitch focused, relatively low-cost missions for it to take on and develop into full-fledged missions. "Although they're not official m...
 The astronomy I learned as a kid was pretty limited — the Earth revolves around the Sun and, of course, the whole "My Very Energetic Mother Just Served Us Nine Pizzas" thing. Of course, that expression no longer applies because our understandin...
The astronomy I learned as a kid was pretty limited — the Earth revolves around the Sun and, of course, the whole "My Very Energetic Mother Just Served Us Nine Pizzas" thing. Of course, that expression no longer applies because our understandin...
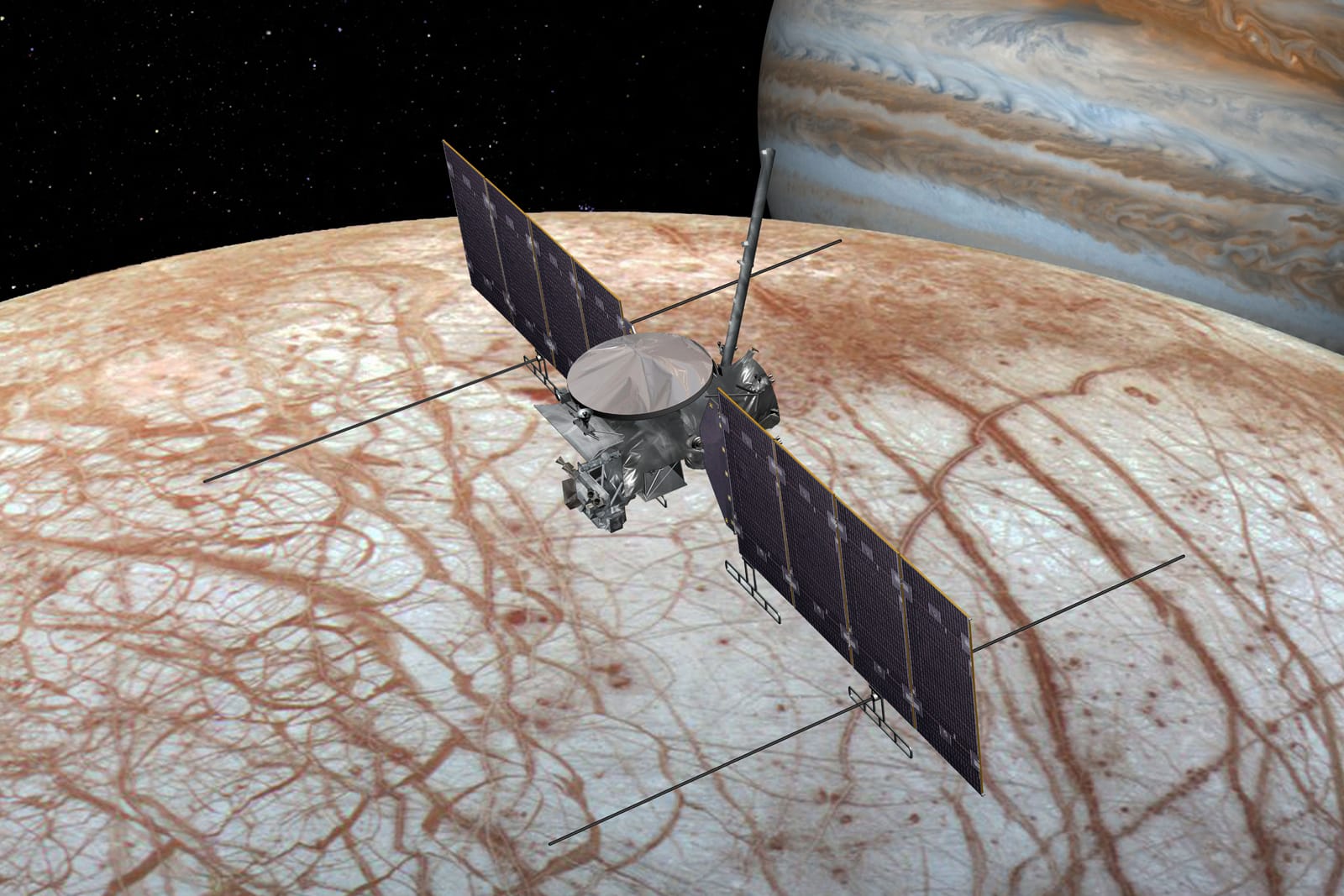 NASA has been talking for years about sending a probe to Europa, and now it's locking down those plans. The agency has confirmed the next phase of its Europa Clipper mission, which will send a spacecraft to the Jovian moon to determine if it could su...
NASA has been talking for years about sending a probe to Europa, and now it's locking down those plans. The agency has confirmed the next phase of its Europa Clipper mission, which will send a spacecraft to the Jovian moon to determine if it could su...
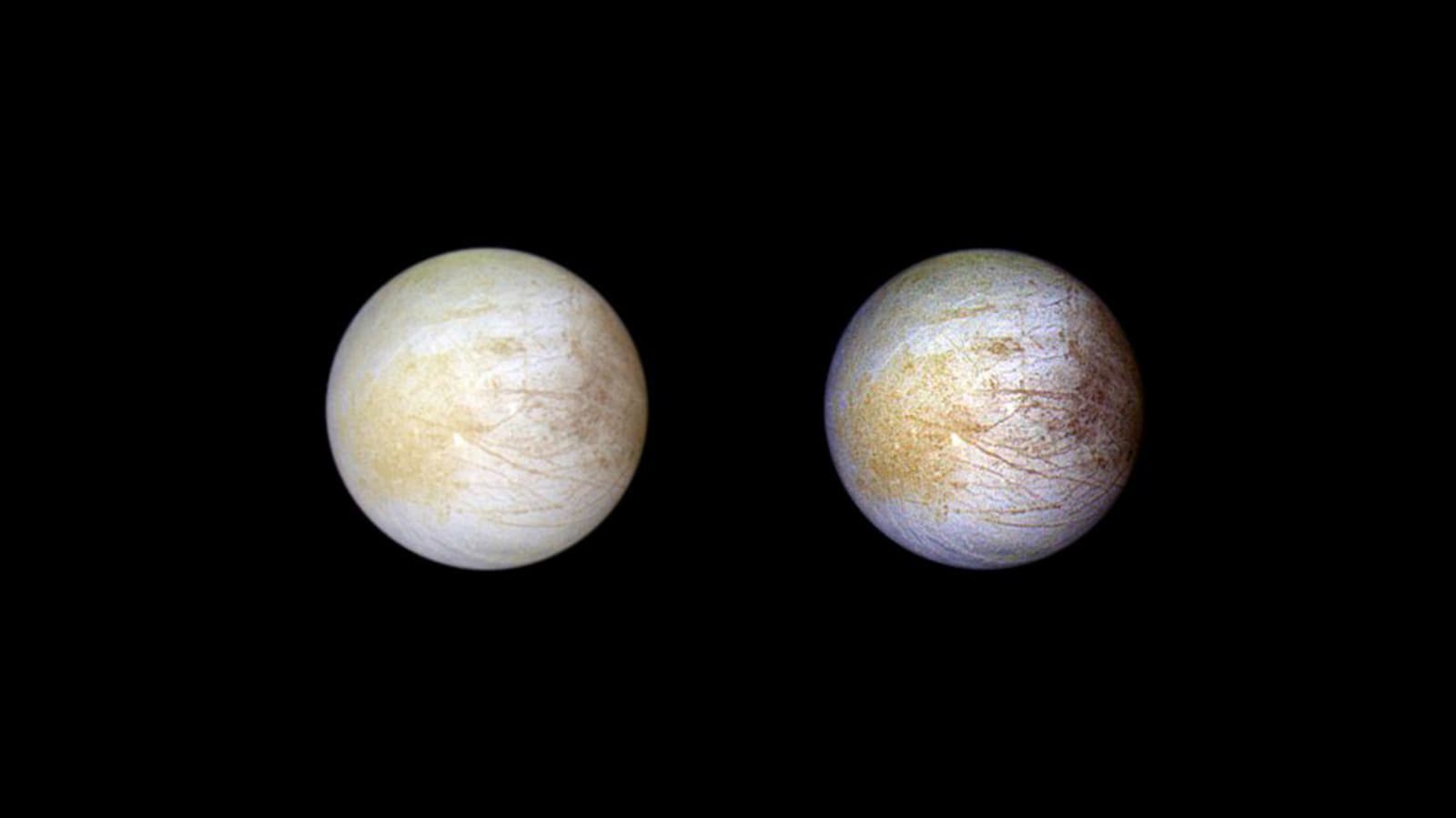 The ocean that scientists believe exists underneath Europa's thick icy crust might be more like our own than previously thought. According to a new study published in Science Advances, a team of researchers used the Hubble Space Telescope Imaging Spe...
The ocean that scientists believe exists underneath Europa's thick icy crust might be more like our own than previously thought. According to a new study published in Science Advances, a team of researchers used the Hubble Space Telescope Imaging Spe...
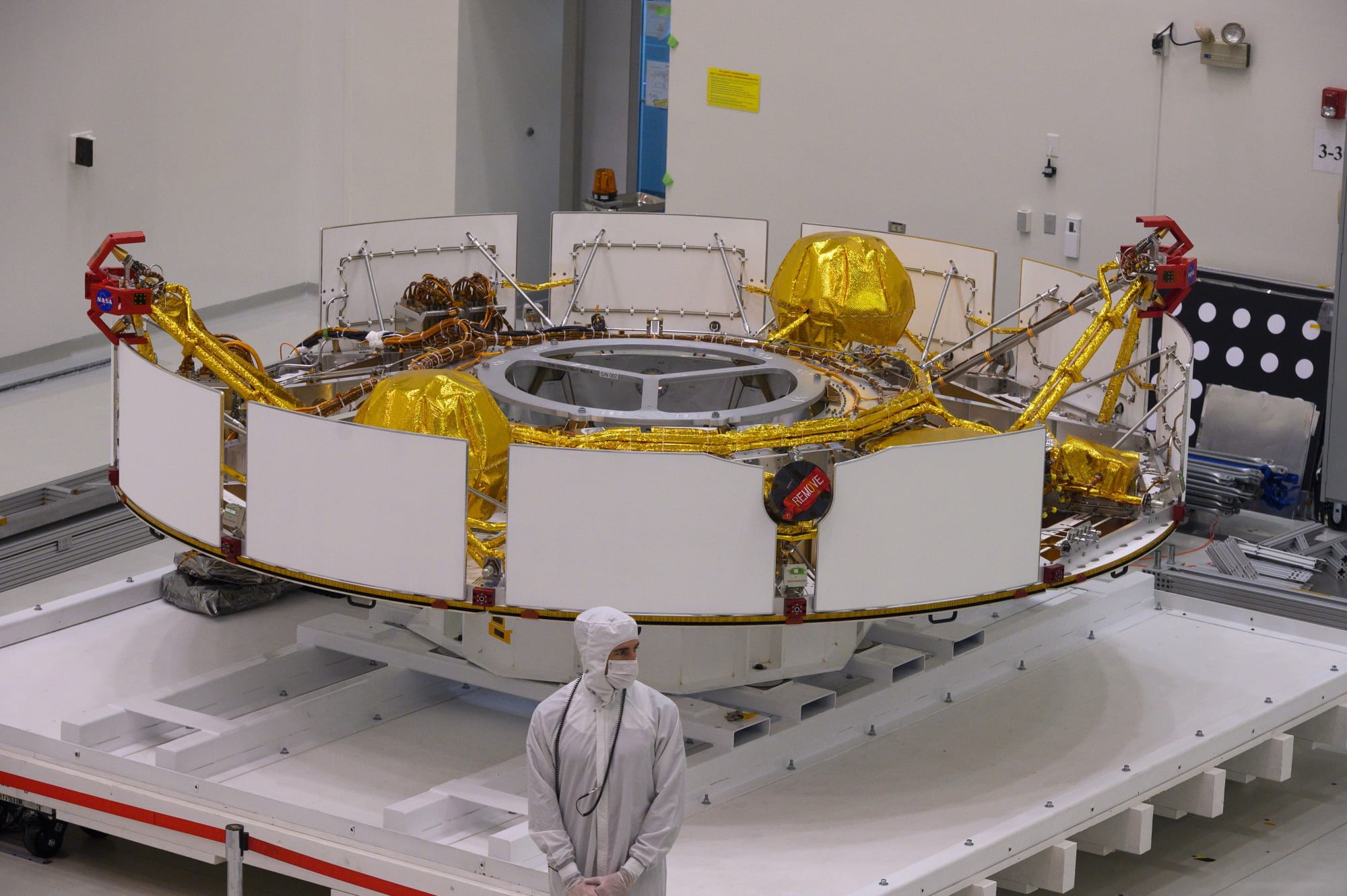
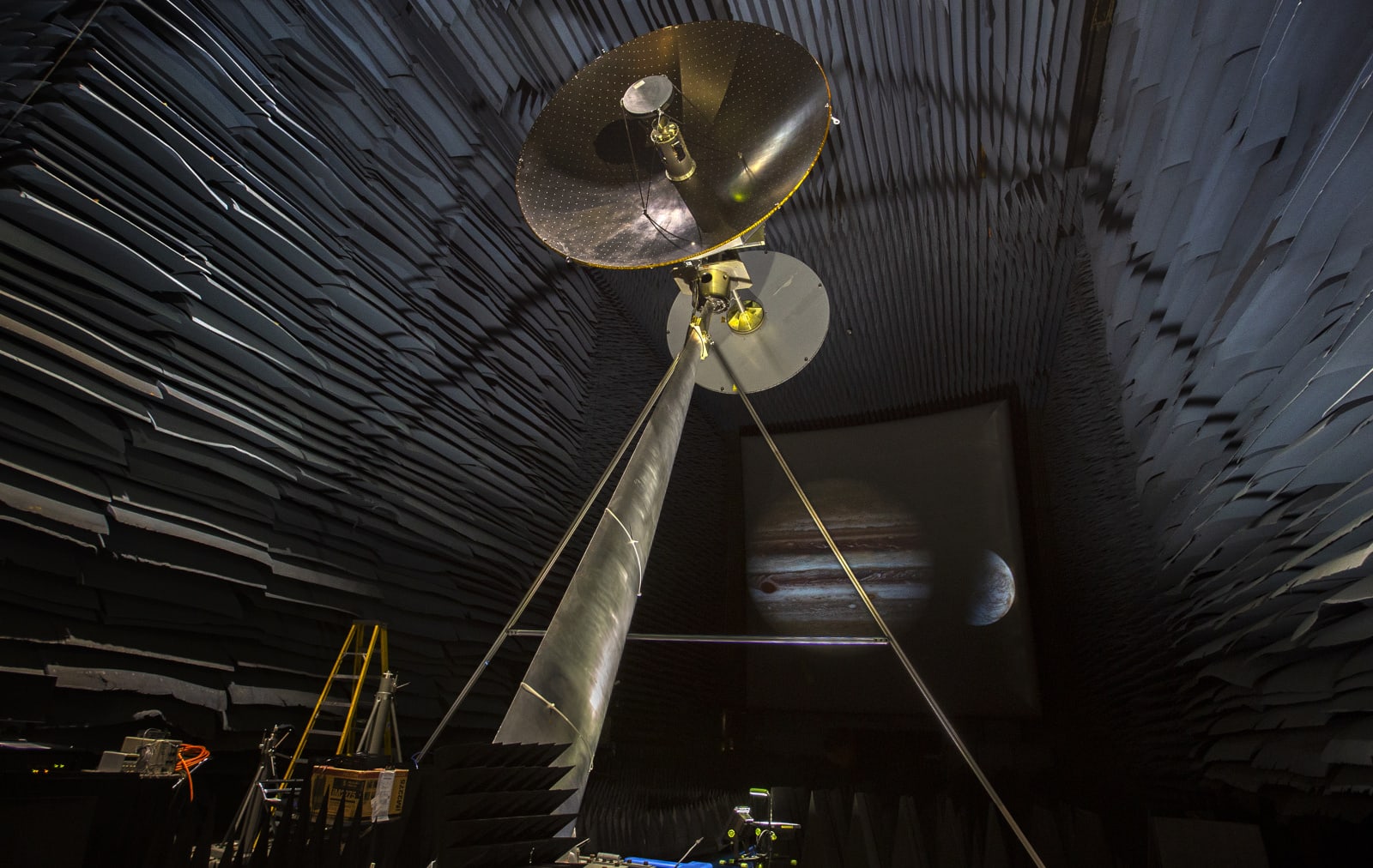 What the Europa Clipper finds when it starts orbiting Jupiter's icy moon won't be of any use to us if it can't send data back to Earth. In order to beam back information from that far into the solar system, the Clipper will be equipped with a high-ga...
What the Europa Clipper finds when it starts orbiting Jupiter's icy moon won't be of any use to us if it can't send data back to Earth. In order to beam back information from that far into the solar system, the Clipper will be equipped with a high-ga...
 President Donald Trump has revealed his proposed budget for the 2020 fiscal year, which "supports the creation" of Space Force (USSF) as the sixth branch of the armed forces. The White House also hopes to bolster cybersecurity and NASA exploration mi...
President Donald Trump has revealed his proposed budget for the 2020 fiscal year, which "supports the creation" of Space Force (USSF) as the sixth branch of the armed forces. The White House also hopes to bolster cybersecurity and NASA exploration mi...
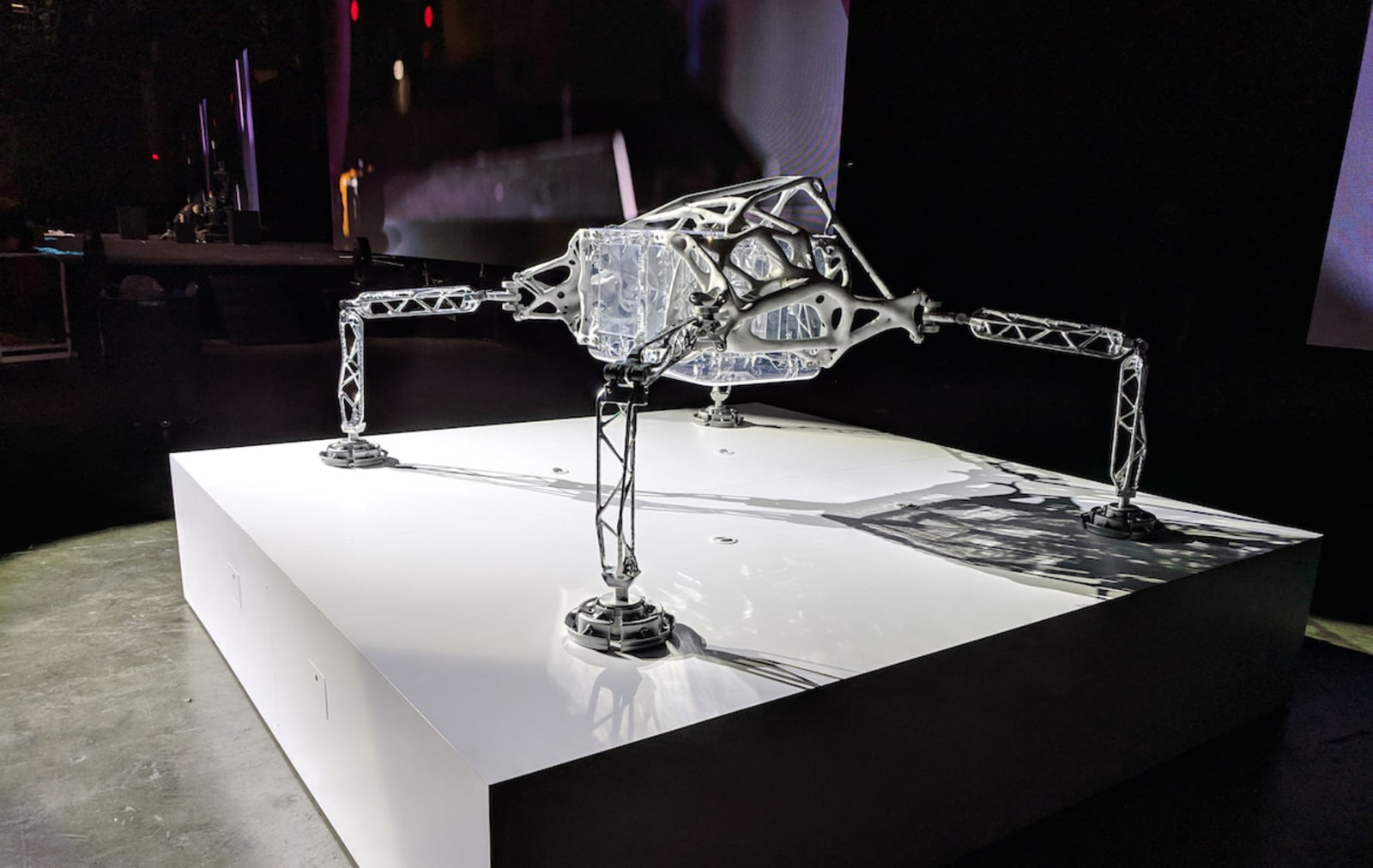 Autodesk, the software company behind AutoCAD, has teamed up with NASA's Jet Propulsion Laboratory (JPL) to look at news ways to create an interplanetary lander that could potentially touch down on the moons of Saturn or Jupiter. When Mark Davis, the...
Autodesk, the software company behind AutoCAD, has teamed up with NASA's Jet Propulsion Laboratory (JPL) to look at news ways to create an interplanetary lander that could potentially touch down on the moons of Saturn or Jupiter. When Mark Davis, the...